Question
a.
Both A and R are correct and R is correct explanation of A
b.
Both A and R are correct but R is not correct explanation of A
c.
A is correct but R is wrong
d.
R is correct but A is wrong
Posted under Electronics and Communication Engineering
Interact with the Community - Share Your Thoughts
Uncertain About the Answer? Seek Clarification Here.
Understand the Explanation? Include it Here.
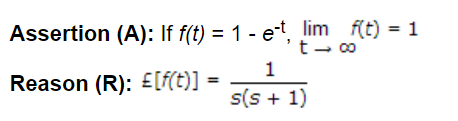
Q. Consider the following statement:
Similar Questions
Explore Relevant Multiple Choice Questions (MCQs)
Q. The system of the given figure
View solution
Q. For a feedback system given below, the velocity error constant Kv is given by
View solution
Q. If G(s)H(s) is given by following equation, the closed loop pole will be located at s = -12 when K =
View solution
Q. In the given figure, the combinations of two non touching loops is
View solution
Q. For the system in the given figure G varies slightly, the ratio of open loop sensitivity to closed loop sensitivity is
View solution
Q. The loop transfer function of a feedback system is given below. The number of asymptotes of its root loci are
View solution
Q. Consider the following statements:
View solution
Q. For a closed loop system given below. The imaginary axis intercept of the root loci will be
View solution
Q. The polar plot of
View solution
Q. A FET is a __________ controlled device whereas a bipolar transistor is a __________ controlled device.
View solution
Q. In Bode diagram (log magnitude plot) the factor 1/jω in the transfer function gives a line having slope
View solution
Q. A negative feedback system has G(s) = 1/(s+1) and H(s) = K/s(s+2). The closed loop system is stable for
View solution
Q. Mechanical impedance is the ratio of
View solution
Q. Whether a linear system is stable or unstable that it
View solution
Q. A lag compensator is essentially a
View solution
Q. Stepper motors find applications in
View solution
Q. For type 2 system, the magnitude and phase angle of the term (jω)² in the denominator, at ω = 0, are respectively
View solution
Q. In an integral controller
View solution
Q. The phase margin and damping ratio have no relation.
View solution
Q. For the transport lag G(jω) = e^(-jωT), the magnitude is always equal to
View solution
Recommended Subjects
Are you eager to expand your knowledge beyond Electronics and Communication Engineering? We've handpicked a range of related categories that you might find intriguing.
Click on the categories below to discover a wealth of MCQs and enrich your understanding of various subjects. Happy exploring!